|
|

|

|
| e-Pub |
Section: New Results
Image assimilation
Sequences of images, such as satellite acquisitions, display structures evolving in time. This information is recognized of major interest by forecasters (meteorologists, oceanographers, etc.) in order to improve the information provided by numerical models. However, the satellite images are mostly assimilated in geophysical models on a point-wise basis, discarding the space-time coherence visualized by the evolution of structures such as clouds. Assimilating in an optimal way image data is of major interest and this issue should be considered in two ways:
-
from the model's viewpoint, the location of structures on the observations is used to control the state vector.
-
from the image's viewpoint, a model of the dynamics and structures is built from the observations.
Model error and motion estimation
Participants : Dominique Béréziat [UPMC] , Isabelle Herlin.
Data assimilation technics are used to retrieve motion from image sequences. These methods require a model of the underlying dynamics, displayed by the evolution of image data. In order to quantify the approximation linked to the chosen dynamic model, an error term is included in the evolution equation of motion and a weak formulation of 4D-Var data assimilation is designed. The cost function to be minimized depends simultaneously on the initial motion field, at the beginning of the studied temporal window, and on the error value at each time step. The result allows to assess the model error and analyze its impact on motion estimation. The approach is used to estimate geophysical forces (gravity, Coriolis, diffusion) from images in order to better assess the surface dynamics [20] and forecast the displacement of structures like oilspill.
Tracking of structures from an image sequence
Participants : Yann Lepoittevin, Isabelle Herlin, Dominique Béréziat [UPMC] .
The research concerns an approach to estimate velocity on an image sequence and simultaneously segment and track a given structure. It relies on the underlying dynamics' equations of the studied physical system. A data assimilation method is designed to solve evolution equations of image brightness, those of motion's dynamics, and those of the distance map modeling the tracked structures. The method is applied on meteorological satellite data, in order to track tropical clouds on image sequences and estimate their motion, as seen on Fig. 3 .
Quantification is obtained on synthetic experiments by comparing trajectories of characteristic points. The respective position of these points on the last image of the sequence for different methods may be compared to that obtained with ground truth as seen on Fig. 4 .
|
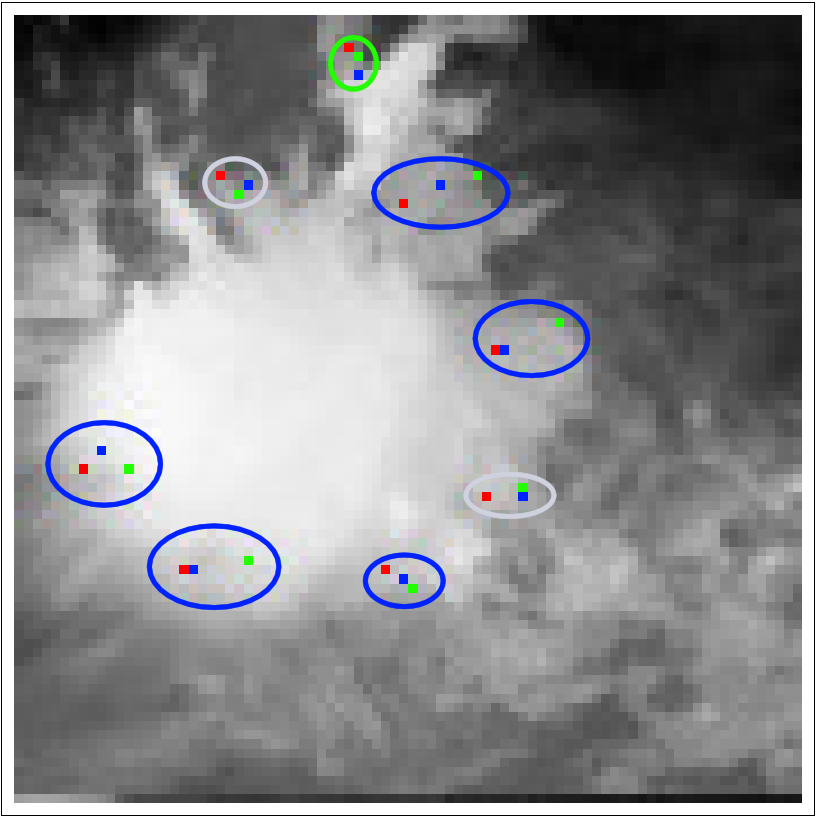
Data assimilation is performed either with a 4D-Var variational approach or with a Kalman ensemble method [22] . In the last case, the initial ensemble is obtained from a set of optical flow methods of the literature with various parameters values.
Motion estimation from images with a waveforms reduced model
Participants : Etienne Huot, Isabelle Herlin, Giuseppe Papari [CFLIR, Belgium] .
Dimension reduction is applied to a model of image evolution, composed of transport of velocity and image brightness. Waveform bases are obtained on the image domain for subspaces of images and motion fields, as eigenvectors of previously defined quadratic functions. Image assimilation with the reduced model allows to estimate velocity fields satisfying the space-time properties chosen defined by the user for designing the quadratic function. This approach allows complex geographical domains and suppresses the difficulty of boundary conditions on such domains: these boundary conditions are automatically applied on the bases elements. Motion estimation is then obtained with a reduced model whose state vector is composed of a few components for motion and images. This has to be compared with the initial motion estimation problem that involves a state vector that has a size proportional to the image domain. Current research concern the definition of new quadratic functions from image properties.
Applying POD on a model output dabase for defining a reduced motion model
Participants : Etienne Huot, Isabelle Herlin.
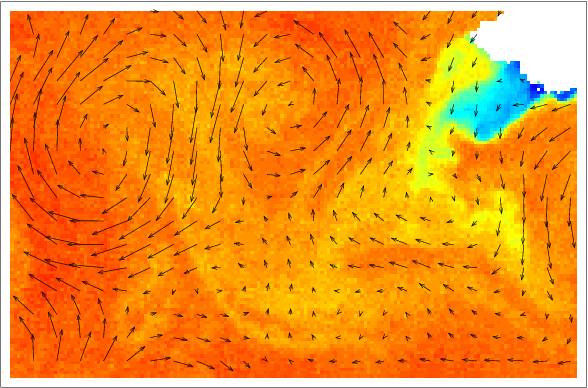
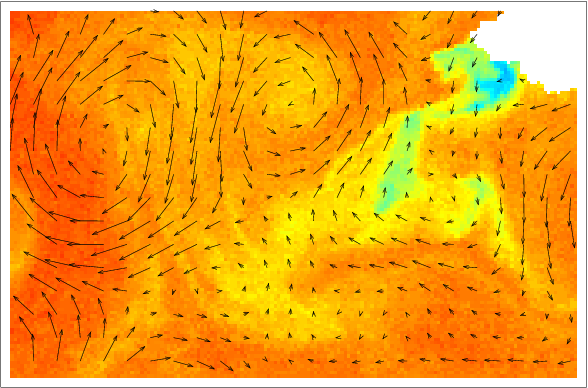
Dimension reduction may also be studied by determining a small size reduced basis obtained by Proper Orthogonal Decomposition (POD) of a motion fields database. This database is constructed for characterizing accurately the surface circulation of the studied area, so that linear combinations of the basis elements obtained by POD accurately describe the motion function observed on satellite image sequences. The database includes the geostrophic motion fields obtained from Sea Level Anomaly reanalysis maps that are available from the MyOcean European project website ( http://www.myocean.eu/ ). Fig. 5 displays such SLA maps and the associated motion fields.
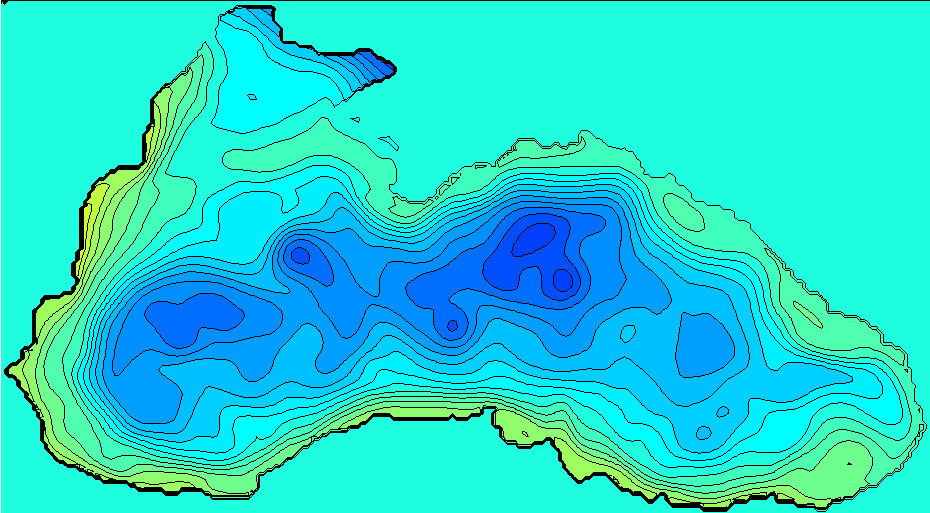
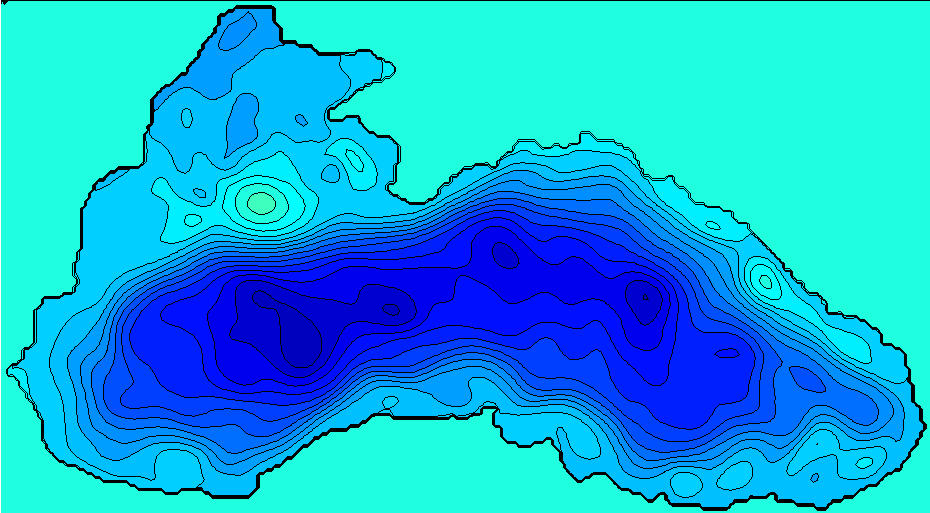


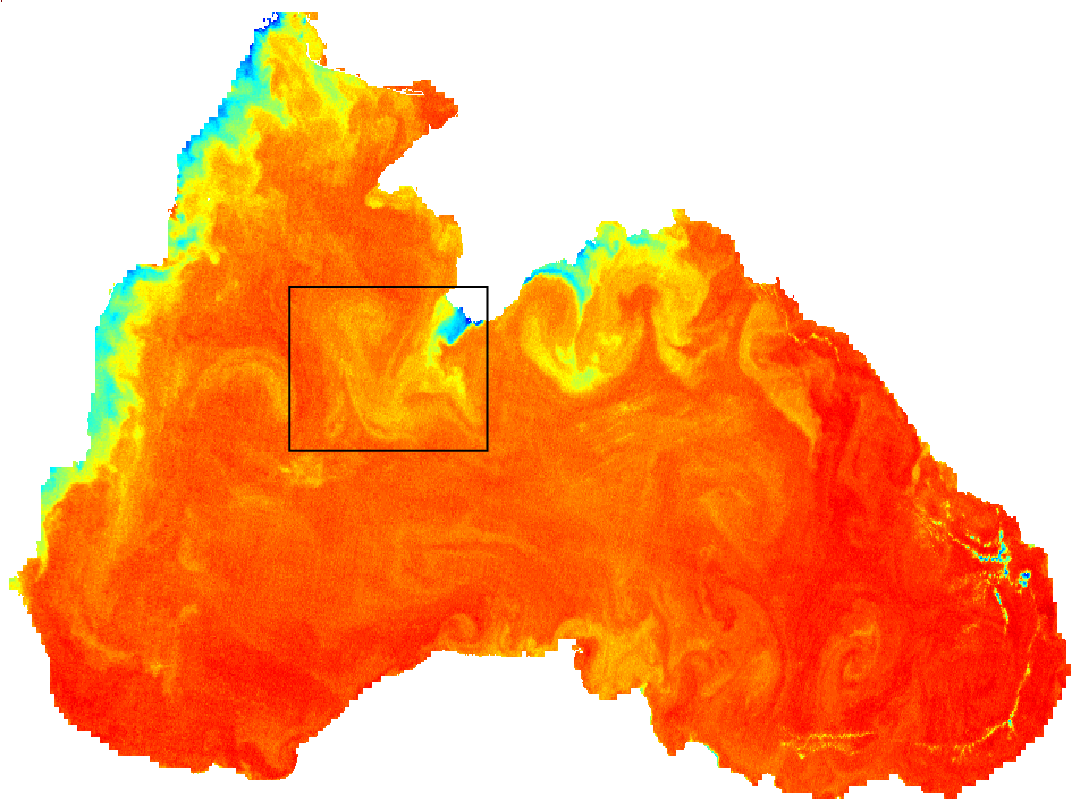
Image assimilation with the POD reduced model allows estimating motion as displayed on Fig. 6 .
Rain nowcasting from radar image acquisitions
Participants : Yann Lepoittevin, Isabelle Herlin.
This research concerns the design of an operational method for rainfall nowcasting that aims at prevention of flash floods. The nowcasting method is based on two main components:
-
a data assimilation method, based on radar images, estimates the state of the atmosphere: this is the estimation phase.
-
a forecast method uses this estimation to extrapolate the state of the atmosphere in the future: this is the forecast phase.
Results were analyzed by Numtech (partner of a joint I-lab) on space-time neighborhood in order to prevent consequences of flash floods on previously defined zone.
Current research concerns the use of object components in the state vector in order to get an improved motion estimation and a better localization of endangered regions.